Orbit Determination System
Use the Orbit Determination System page to configure the flight software ephemeris propagator for the simulated spacecraft. The propagator determines the spacecraft's on-board estimate of its current orbit position and velocity.

On-Board Orbit Propagator
In the On-Board Orbit Propagation section, you can set specific properties for the orbit propagator.

| Parameter | Description |
|---|---|
| Include Non-Gravity Accelerations | If selected, the propagator for the satellite uses non-gravity acceleration estimates from vehicle state. For example, accelerations from thruster firings would be included in the propagation. |
| Max Propagation Time | Maximum time to propagate an ephemeris entry (GPS measurement or Table entry) and still consider the ephemeris valid. |
| Desired Step Size | When propagating ephemeris vectors forward (for determining slew destinations), this time step is used. Partial time steps are autonomously handled by the flight software. |
| Max Steps | When propagating ephemeris vectors forward (for determining slew destinations), up to this number of steps is used before the software starts using a step size greater than the Desired Step Size. |
Central Body Management
Ephemeris Method & Spacecraft CBI Frame
At the top of the Central Body Management section, you can specify both the central body ephemeris method and spacecraft CBI frame. The current spacecraft primary central body is shown for convenience.

Ephemeris Method
The Ephemeris Method specifies the data source for all central bodies configured within the SOLIS satellite. Descriptions of options for specifying central body ephemeris methods:
| Option | Description |
|---|---|
| SPICE | Use SPICE kernel files as ephemeris source for all central bodies (default) |
| Vallado | Use Vallado closed-form solution as ephemeris source. Only available if Earth is the spacecraft central body. |
SPICE Support
SOLIS supports the following central bodies for the SPICE ephemeris method. Note that rotation data is not provided for all bodies. When there is no rotation SPICE file, behavior defaults to a simple rotation model with a rotation rate based on the central body properties. Data was derived from JPL kernel file DE430 with a valid time period from 2010-2050.
| Central Body | Position Support | Rotation Support |
|---|---|---|
| Deimos | Y | |
| Earth | Y | Y |
| Europa | Y | |
| Jupiter | Y | |
| Mars | Y | |
| Mercury | Y | |
| Moon | Y | Y |
| Neptune | Y | |
| Phobos | Y | |
| Pluto | Y | |
| Saturn | Y | |
| Uranus | Y | |
| Venus | Y |
Spacecraft CBI Frame
All central body data and spacecraft spatial computations are reported and/or performed in the selected Spacecraft CBI Frame. Descriptions of options for specifying spacecraft Central Body Inertial (CBI) frame:
| Option | Description |
|---|---|
| J2000 | Mean Equator and Mean Equinox of the J2000 epoch (default) |
| TrueOfDate | True-of-Date frame for the selected spacecraft central body |
See Descriptions of Coordinate Systems in STK for complete definitions of each frame.
CBI Epoch (UTCG)
Specify the Epoch in UTCG to use for the selected Spacecraft CBI frame. This input applies to any computation that depends on a frame requiring a specified Epoch (e.g. TrueOfDate/TOD).
FSW Central Body Ephemeris Sources
This section provides a tabular summary of all central bodies configured within SOLIS. You can add/delete source central body to/from this list. Any central bodies added to this list must also exist as an object within the STK scenario.
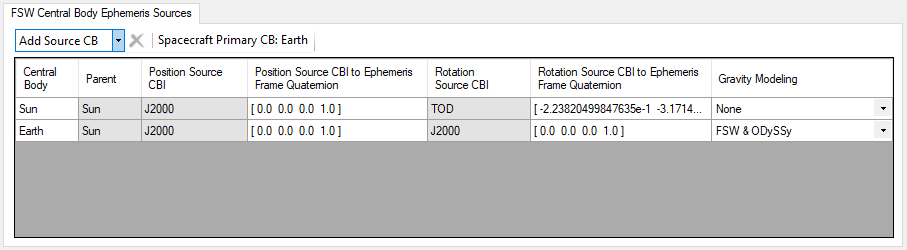
With the exception of adding/deleting central bodies and choosing a gravity modeling setting, user input is not typically required within this section.
Table Column Descriptions
| Table Column | Description |
|---|---|
| Central Body | Central body of interest. All other columns relative to this body. |
| Parent | Parent of Central Body |
| Position Source CBI | Native inertial frame of the central body source ephemeris data, based on user selected Ephemeris Method. |
| Position Source CBI to Ephemeris Frame Quaternion | Quaternion relating the position source CBI to user selected Spacecraft CBI Frame. This parameter is what allows the ephemeris source data CBI and spacecraft CBI frame to differ. |
| Rotation Source CBI | Native inertial frame of the central body source rotation/attitude data, based on user selected Ephemeris Method. |
| Rotation Source CBI to Ephemeris Frame Quaternion | Quaternion relating the rotation source CBI to user selected Spacecraft CBI Frame. This parameter is what allows the ephemeris source data CBI and spacecraft CBI frame to differ. |
| Gravity Modeling | Third body gravity modeling setting. Options are: FSW & ODySSy, FSW Only, ODySSy Only, or None (default is FSW & ODySSy for primary CB and None otherwise) |
Spacecraft Ephemeris Source
Ephemeris source determines what method is being used for estimating position and velocity data. When either Table, PVT, or Direct Update are selected additional options become available for the GPS Filter and Ephemeris Table.

| Option | Description |
|---|---|
| Perfect | Position and Velocity data is taken directly from ODySSy which provides perfect state knowledge. |
| Table | Propagate within a table of position and velocity reference points at specified times |
| PVT | Propagate periodic updates of Position/Velocity/Time via EphemEntry connection. Typically used for GPS measurements or SPICE lookups via SPK. |
| Direct Update | Position and velocity states updated via SetEphemEntry over the FSW_Ephemeris interface. No propagation of these updates is done. |
Ephemeris Table
The Ephemeris Table data can be used if GPS or Table has been selected as an Ephemeris Source. If Table is selected (or switched to during a simulation), SOLIS will use the most recent ephemeris to compute a position and velocity for the spacecraft using a J4 propagator.

GPS Filter
If a GPS sensor has been created and GPS or Table has been selected as an Ephemeris Source, you are able to set GPS parameters.
The GPS filter operates as a fixed gain filter with the following parameters. More information can be found on the GPS page.
Basic Parameters
Description of basic parameters for GPS filter:

| Parameter | Description |
|---|---|
| Sensor Processing Method | Select a method for processing multiple GPS sensors. |
| Position Gain | Gain to apply to position residual for correction from an accepted measurement. |
| Velocity Gain | Gain to apply to velocity residual for correction from an accepted measurement. |
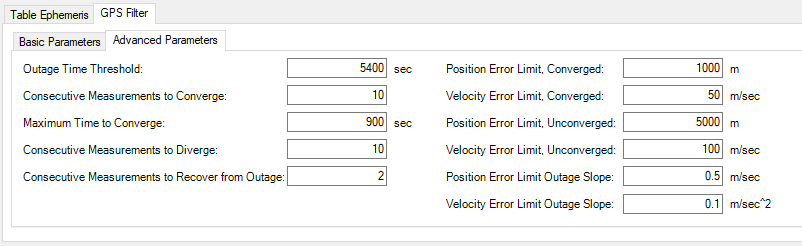
Advanced Parameters
Description of advanced parameters for GPS filter:
| Parameter | Description |
|---|---|
| Outage Time Threshold | Time from the last valid measurement to declare an outage. |
| Consecutive Measurements to Coverage | Number of consecutive measurements required to set the GPS filter converged. |
| Maximum Time to Converge | Maximum time allowed for the filter to converge before resetting. |
| Consecutive Measurements to Diverge | Number of consecutive measurements outside the unconverged error limits required to set the GPS filter diverged. |
| Consecutive Measurements to Recover from Outage | Number of consecutive measurements required following an outage to recover the filter. |
| Position Error Limit, Converged | Position error limit when the filter is converged. |
| Velocity Error Limit, Converged | Velocity error limit when the filter is converged. |
| Position Error Limit, Unconverged | Position error limit when the filter is unconverged. |
| Velocity Error Limit, Unconverged | Velocity error limit when the filter is unconverged. |
| Position Error Limit Outage Slope | Rate at which the position error limit will increase during an outage. |
| Velocity Error Limit Outage Slope | Rate at which the velocity error limit will increase during an outage. |